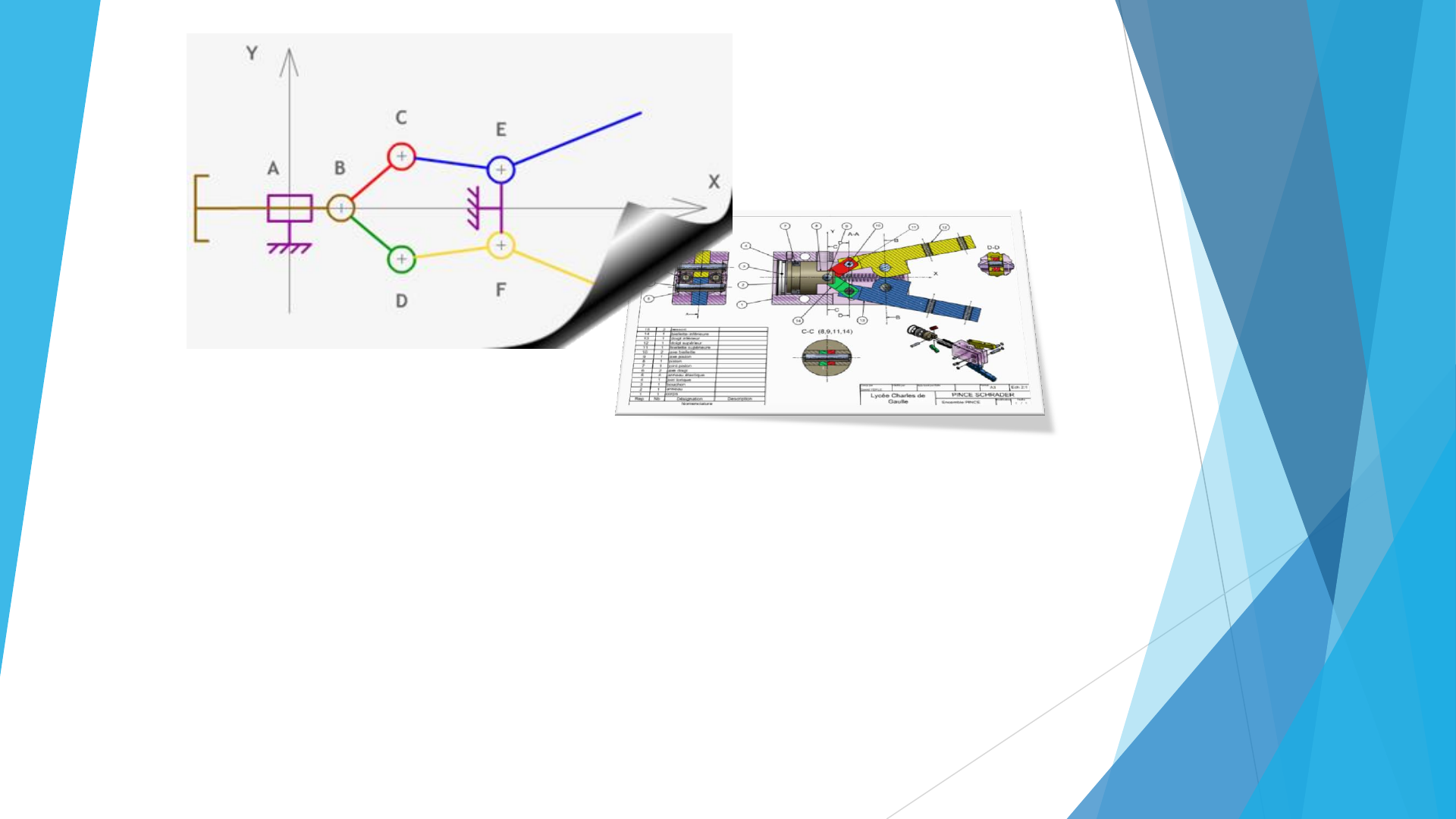
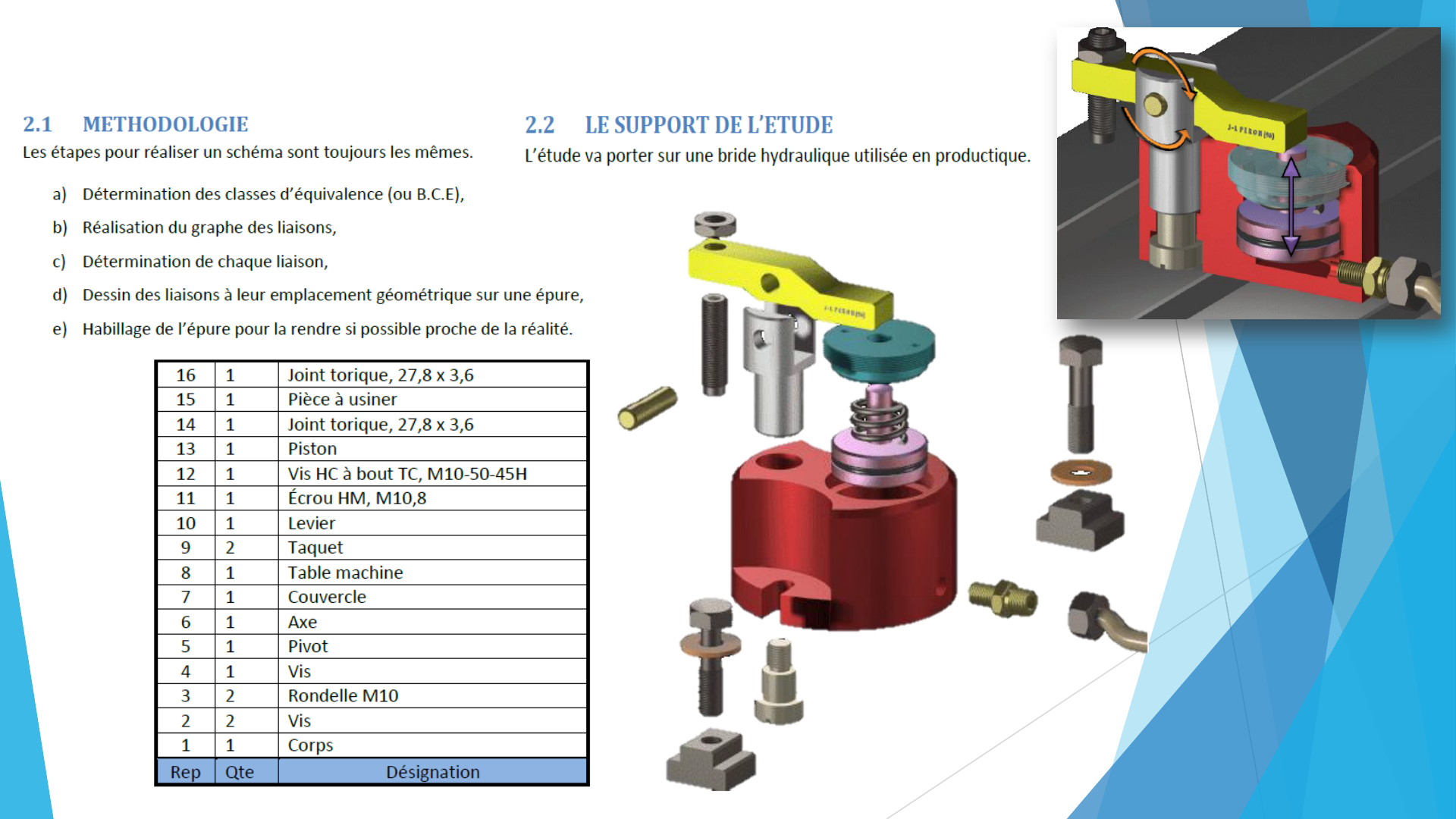
Le schéma cinématique
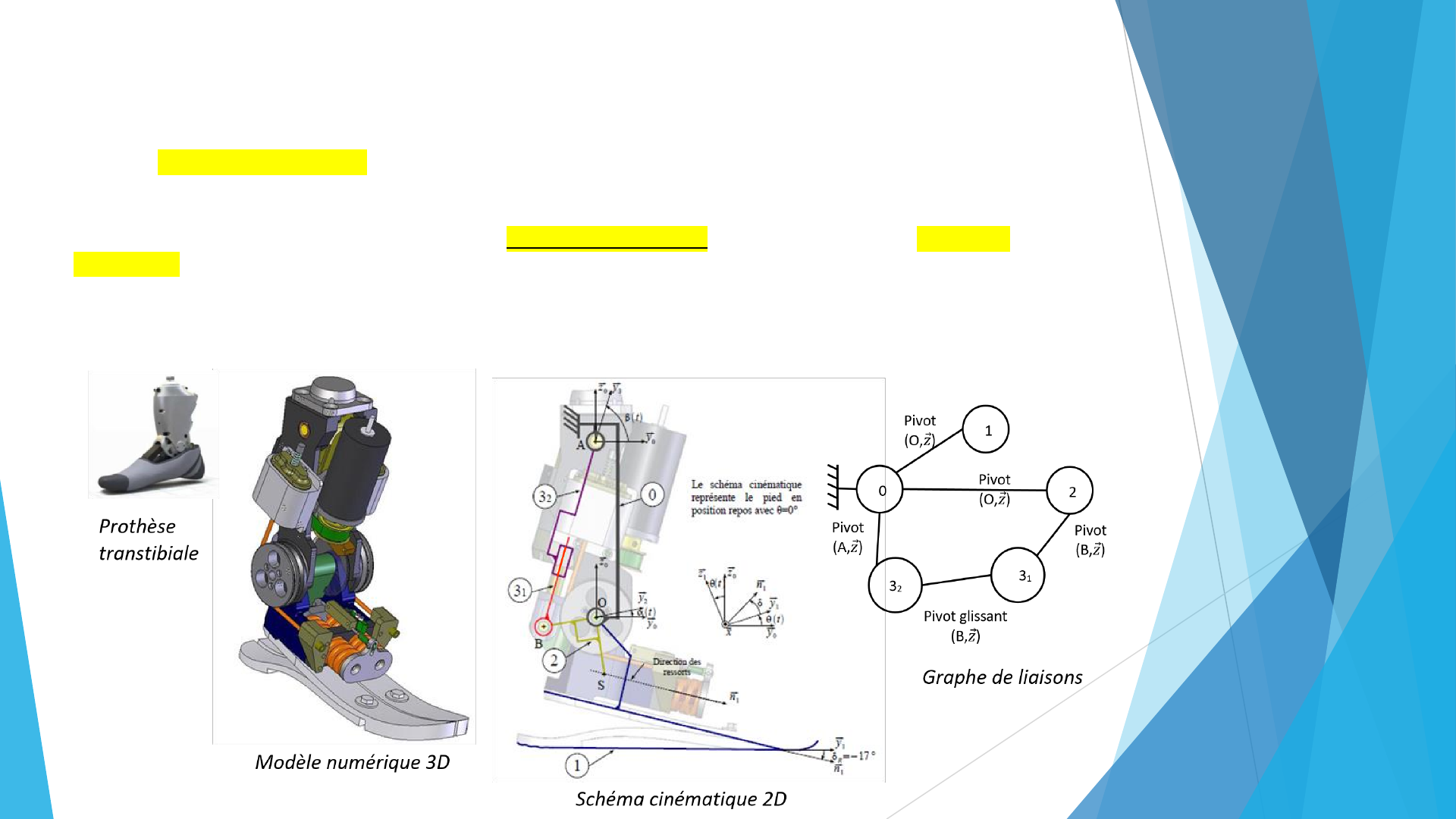
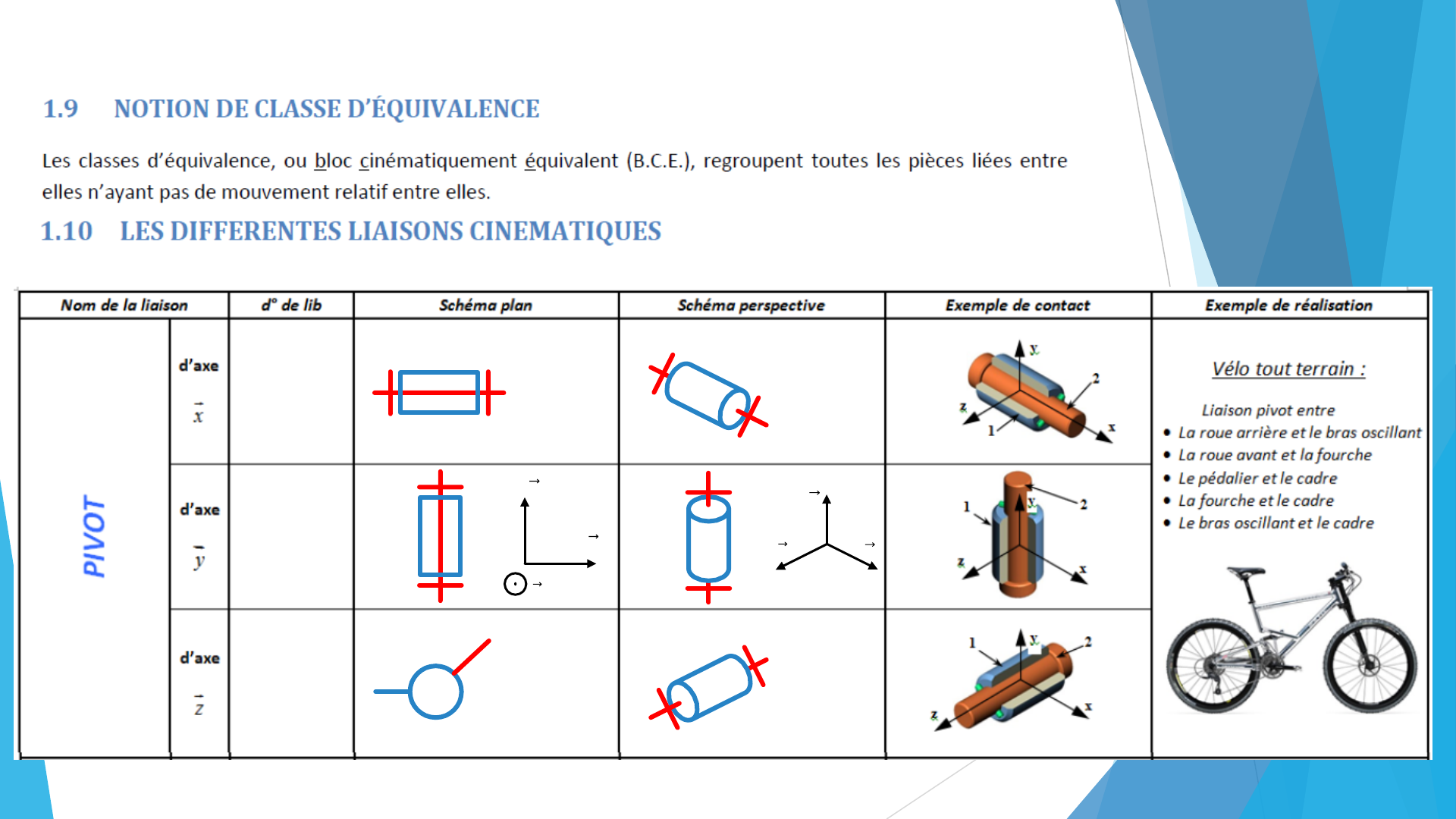
LES LIAISONS CINEMATIQUES
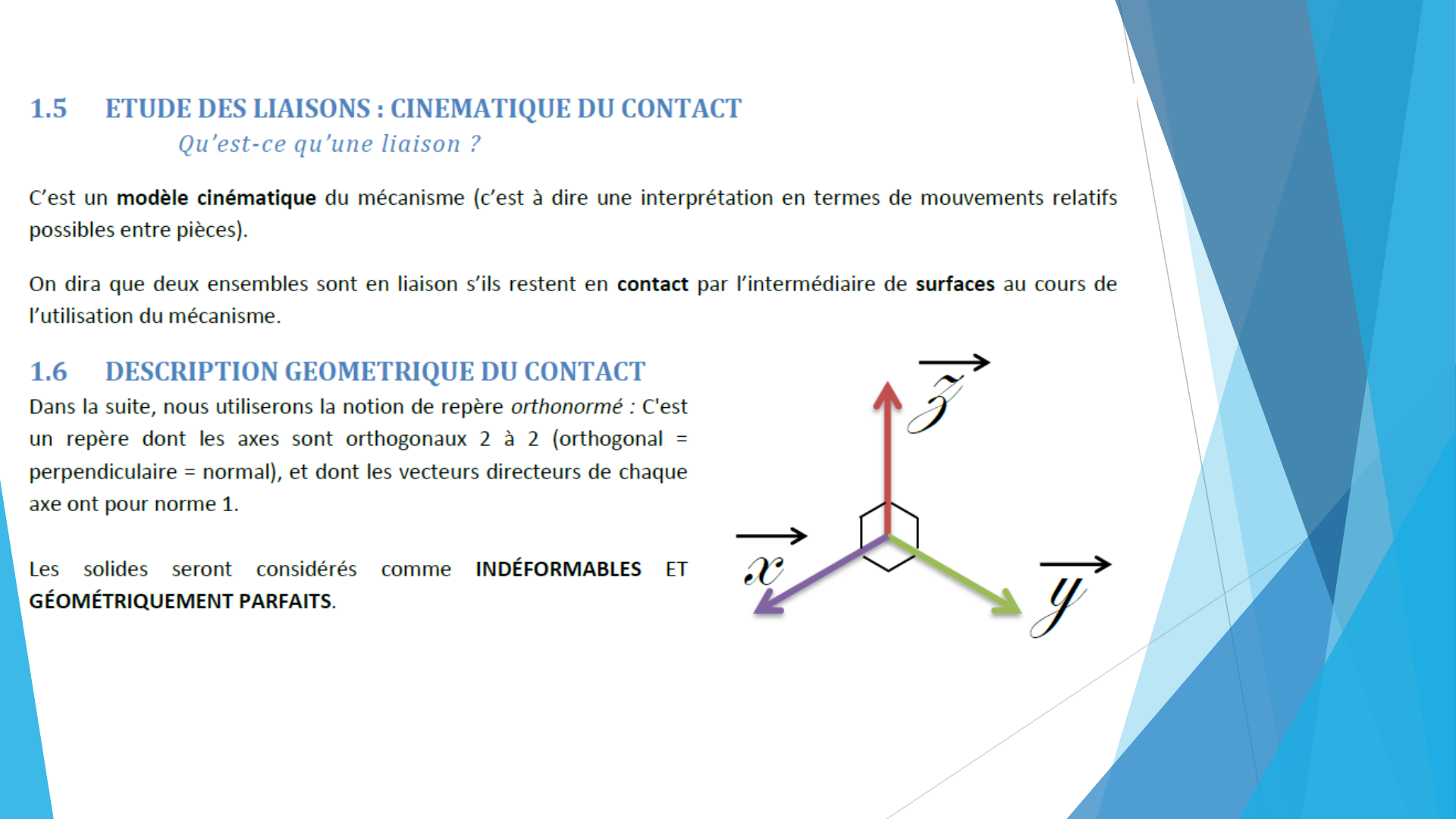
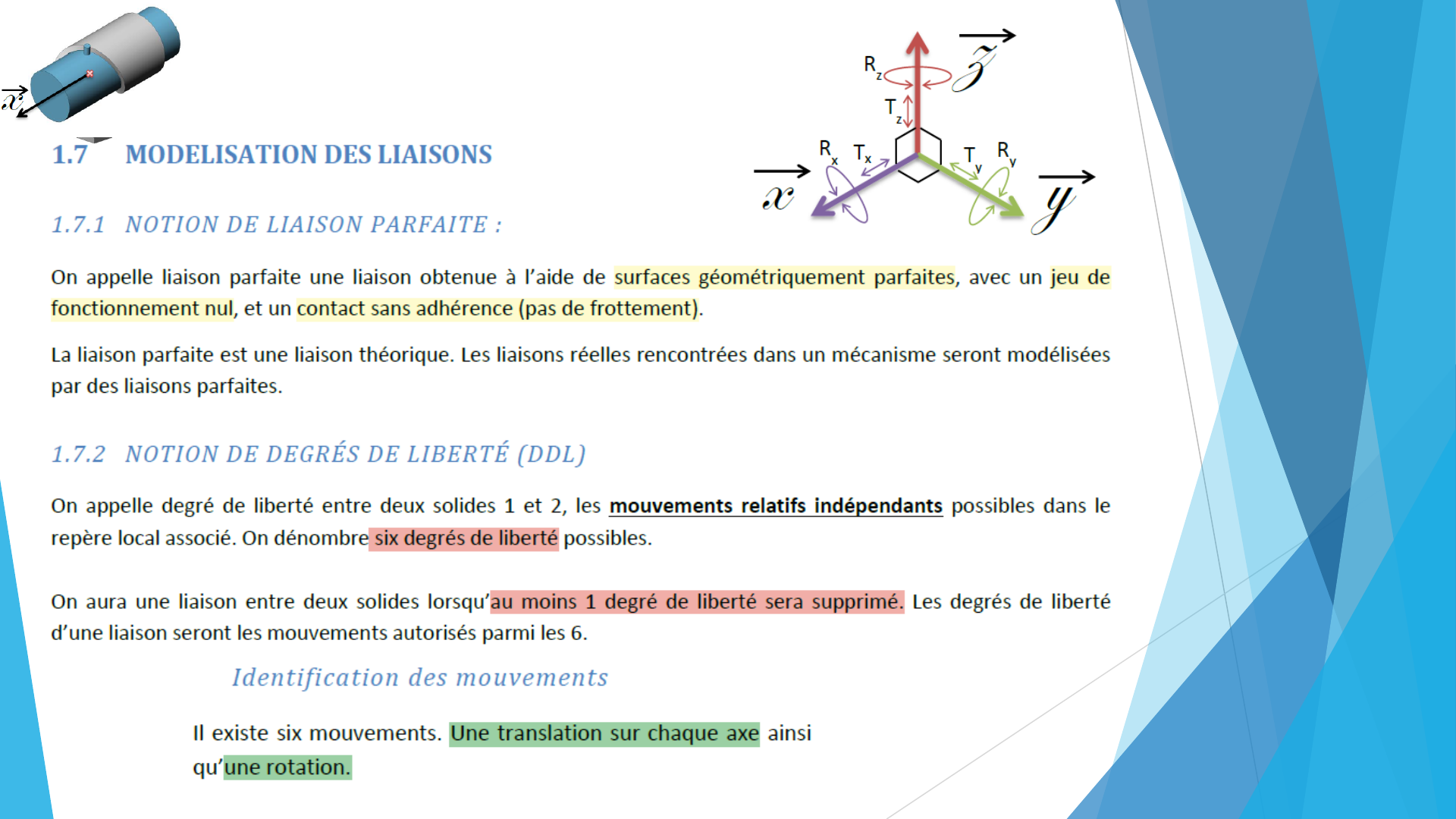
QU’EST-CE QU’UNE LIAISON ?
C’est un modèle cinématique du mécanisme (c’est à dire une interprétation en termes de
mouvements relatifs possibles entre pièces).
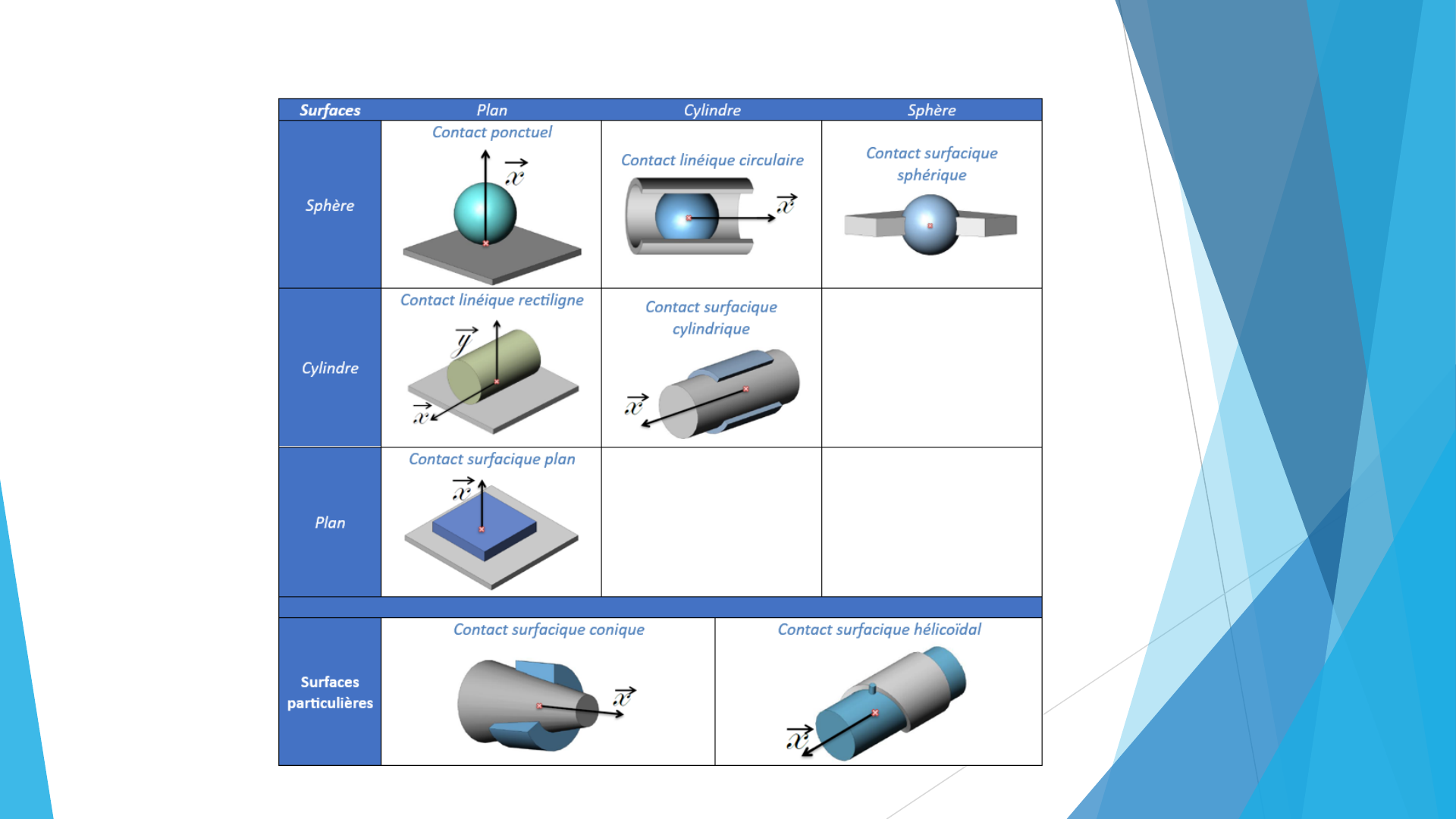
On dira que deux ensembles sont en liaison s’ils restent en contact par l’intermédiaire de surfaces
de contact au cours de l’utilisation du mécanisme.
Nous verrons cependant que la connaissance des surfaces de contact n’est pas toujours suffisante
pour connaître les possibilités de mouvement, et donc pour définir la liaison mise en jeu.
LES LIAISONS CINEMATIQUES
1. NOTION DE SOLIDE
Solide réel :
C'est un solide dont la masse est constante, mais dont les autres grandeurs caractéristiques peuvent varier : température, dimension…
Solide indéformable :
C'est un solide dont le volume et les formes seront invariants quelles que soient les actions qui lui sont appliquées. Cette hypothèse
simplificatrice sera utilisée en statique et cinématique. Les déformations restant très souvent faibles, cette hypothèse est justifiée.
On appelle système matériel une pièce dont la masse reste
constante pendant son étude.
Ex: Le corps de la came de serrage ou une partie de ce corps sont
des systèmes matériels différents.
Système matériel isolé :
Isoler un système matériel consistera à imaginer le système seul, isolé par une frontière fictive. Les solides qui étaient
en contact avec lui seront alors considérés comme des éléments extérieurs.
Ex:
• Si on isole la came alors: le levier, la pièce, l’axe, et le corps sont les solides extérieurs agissant sur elle.
• Si on isole l’axe alors le corps et la came sont les deux seuls solides extérieurs agissant sur lui.
1. NOTION DE SYSTEME MATERIEL
Système matériel :
LES LIAISONS CINEMATIQUES
LES LIAISONS CINEMATIQUES
LES LIAISONS CINEMATIQUES
LES LIAISONS CINEMATIQUES
!
LES LIAISONS CINEMATIQUES
T
X
= 0 R
X
= 1
T
Y
= 0 R
Y
= 0
T
Z
= 0 R
Z
= 0
T
X
= 0 R
X
= 0
T
Y
= 0 R
Y
= 1
T
Z
= 0 R
Z
= 0
T
X
= 0 R
X
= 0
T
Y
= 0 R
Y
= 0
T
Z
= 0 R
Z
= 1
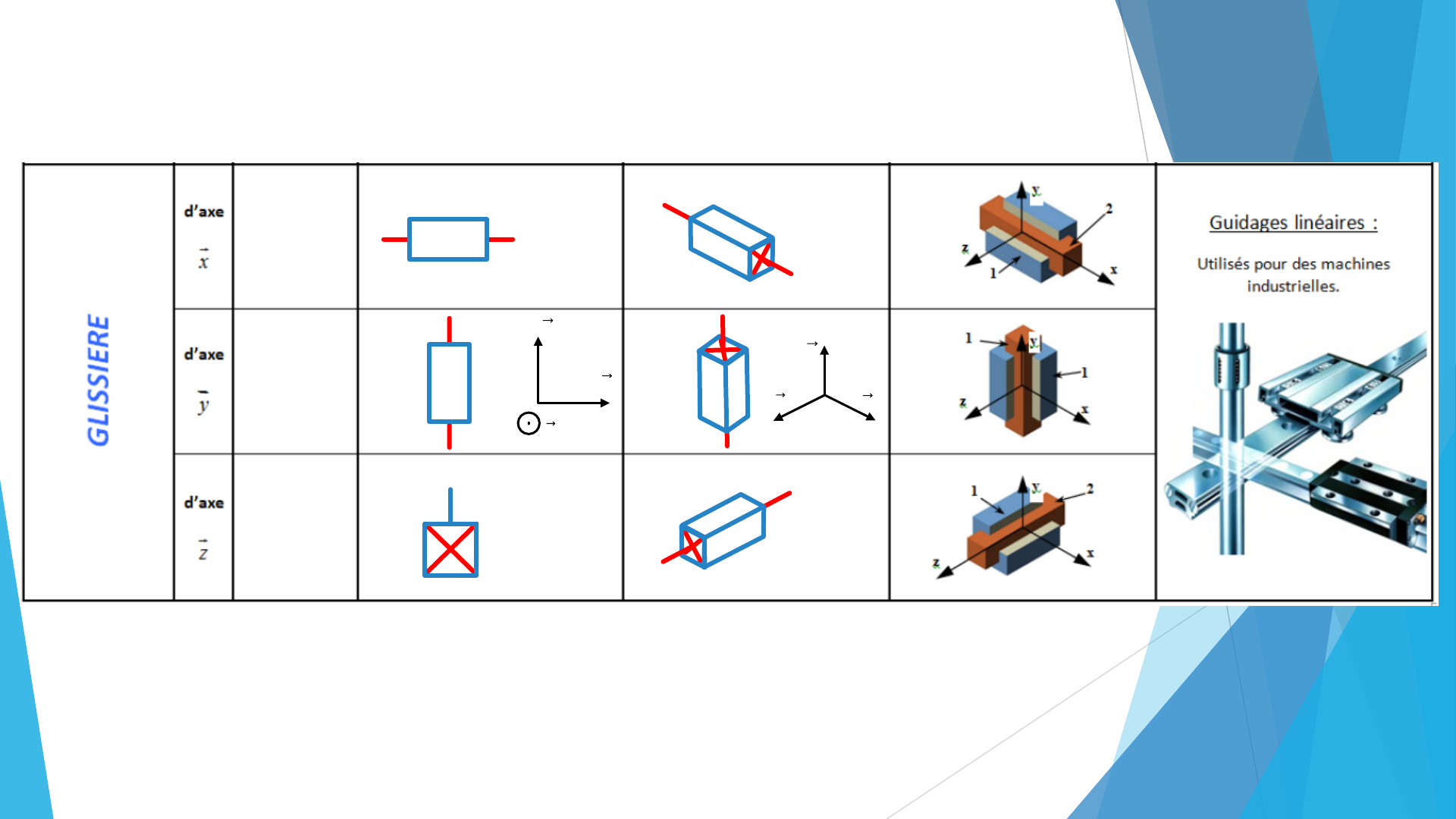
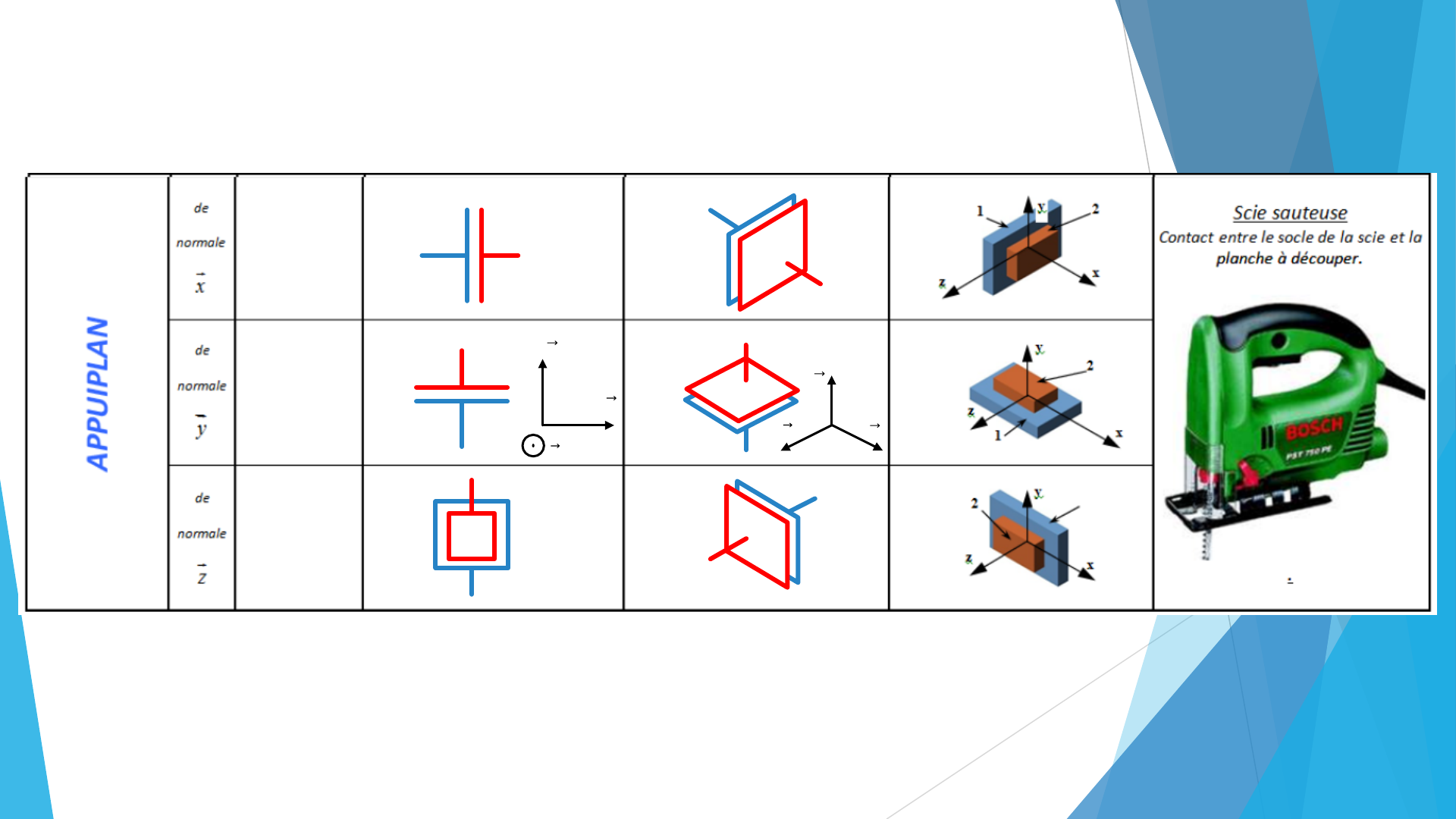
LES LIAISONS CINEMATIQUES
T
X
= 1 R
X
= 0
T
Y
= 0 R
Y
= 0
T
Z
= 0 R
Z
= 0
T
X
= 0 R
X
= 0
T
Y
= 1 R
Y
= 0
T
Z
= 0 R
Z
= 0
T
X
= 0 R
X
= 0
T
Y
= 0 R
Y
= 0
T
Z
= 1 R
Z
= 0
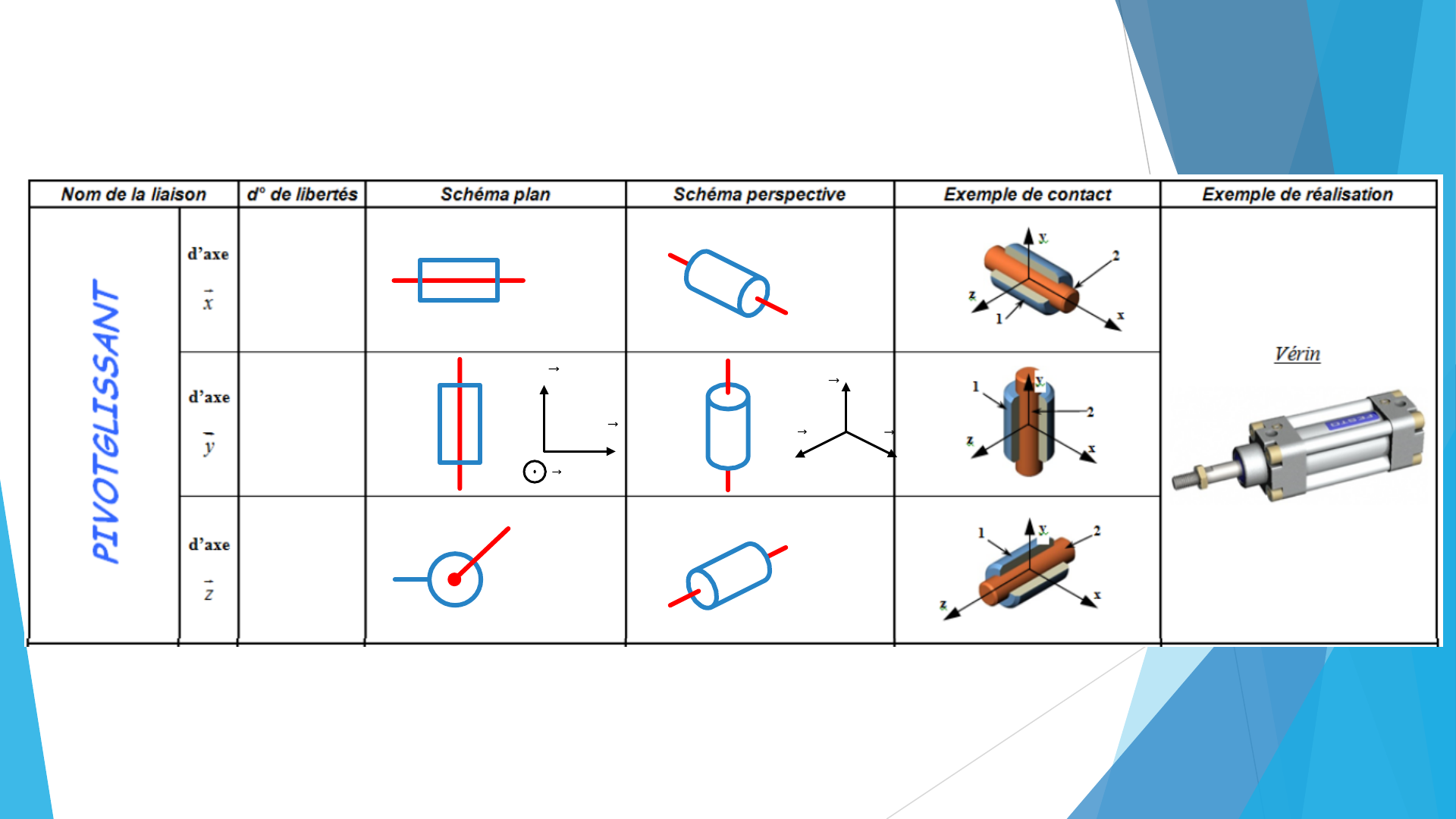
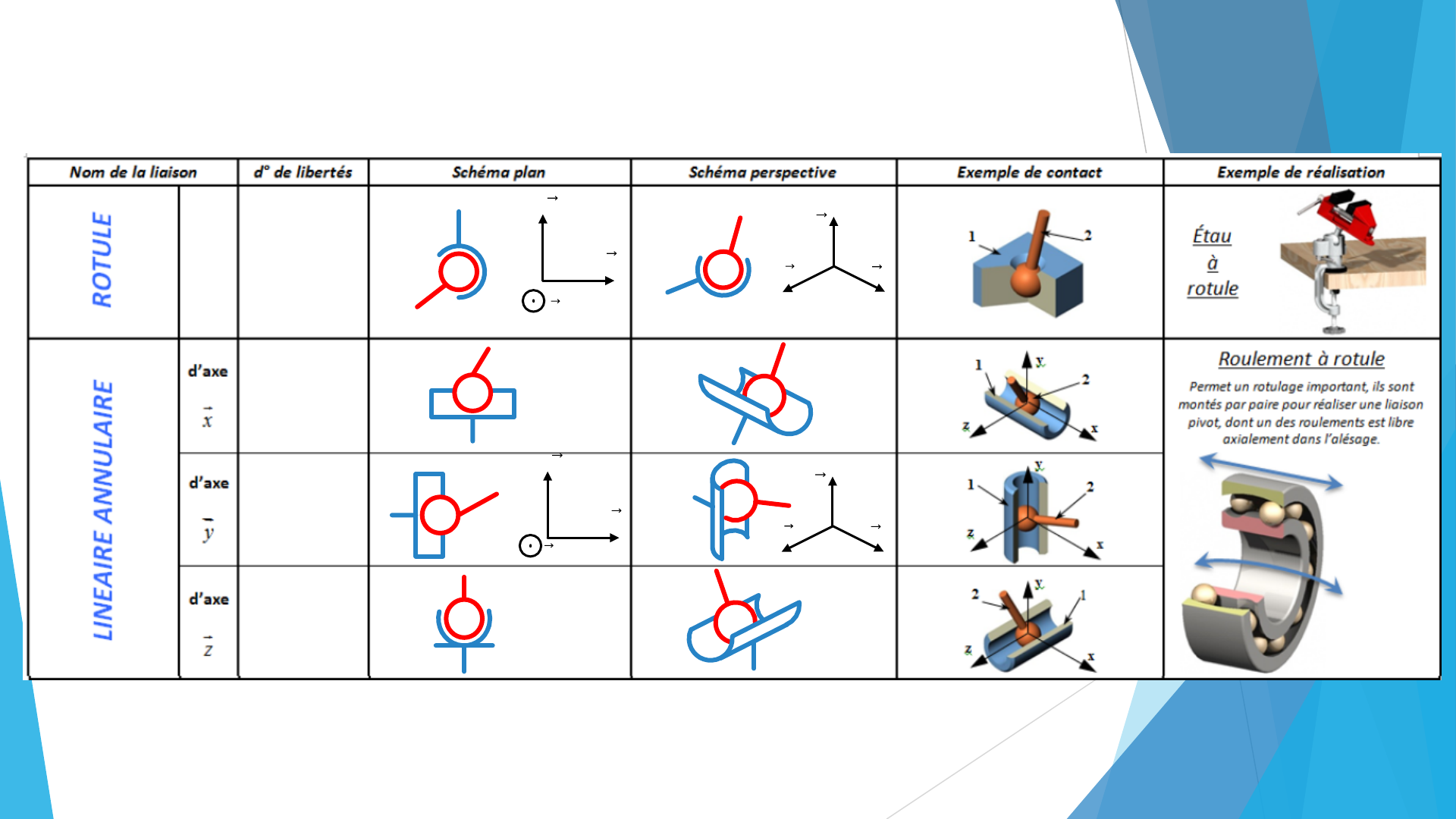
LES LIAISONS CINEMATIQUES
T
X
= 1 R
X
= 1
T
Y
= 0 R
Y
= 0
T
Z
= 0 R
Z
= 0
T
X
= 0 R
X
= 0
T
Y
= 1 R
Y
= 1
T
Z
= 0 R
Z
= 0
T
X
= 0 R
X
= 0
T
Y
= 0 R
Y
= 0
T
Z
= 1 R
Z
= 1
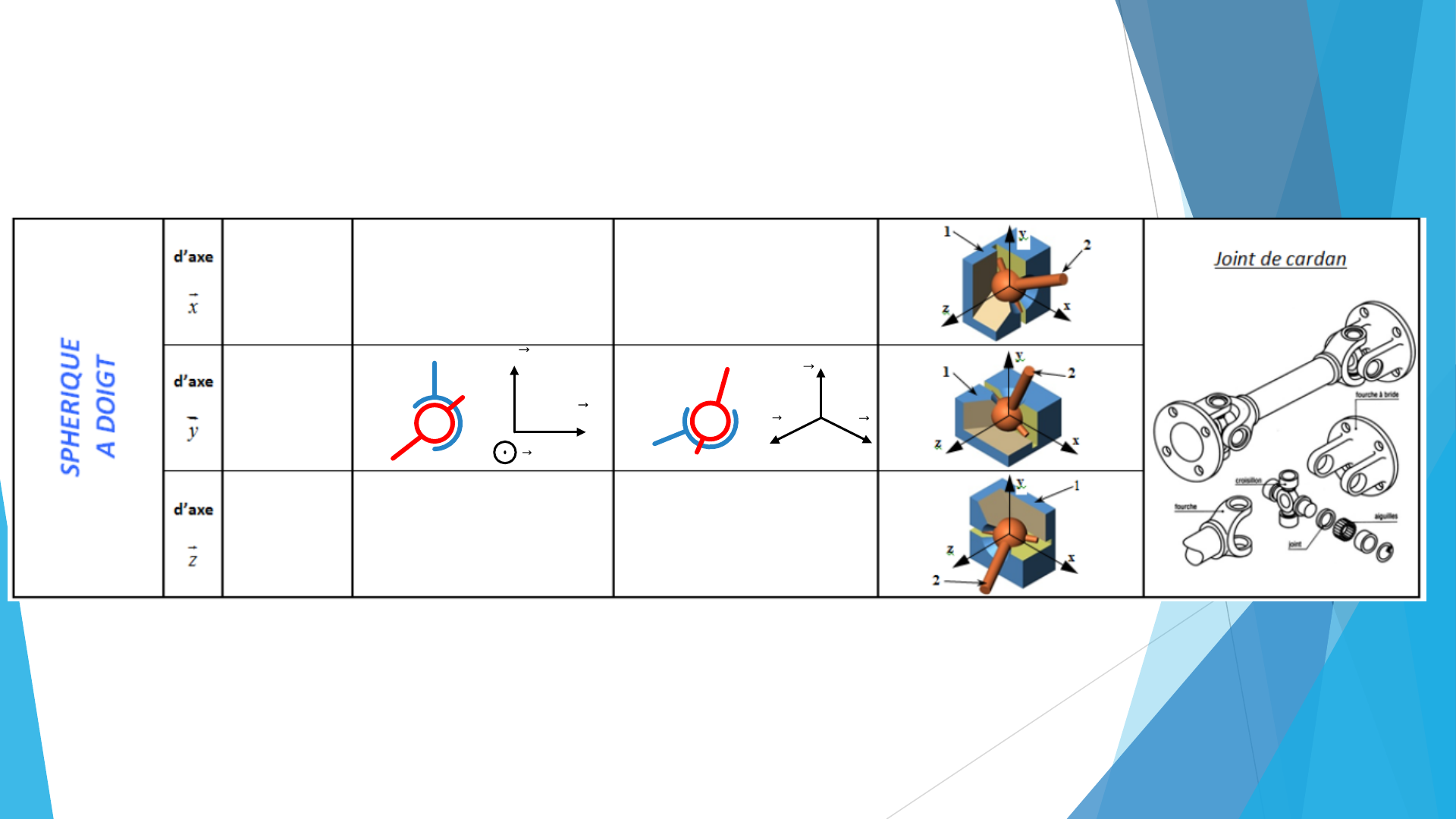
LES LIAISONS CINEMATIQUES
T
X
= 1 R
X
= 1
T
Y
= 0 R
Y
= 0
T
Z
= 0 R
Z
= 0
T
X
= 0 R
X
= 0
T
Y
= 1 R
Y
= 1
T
Z
= 0 R
Z
= 0
T
X
= 0 R
X
= 0
T
Y
= 0 R
Y
= 0
T
Z
= 1 R
Z
= 1
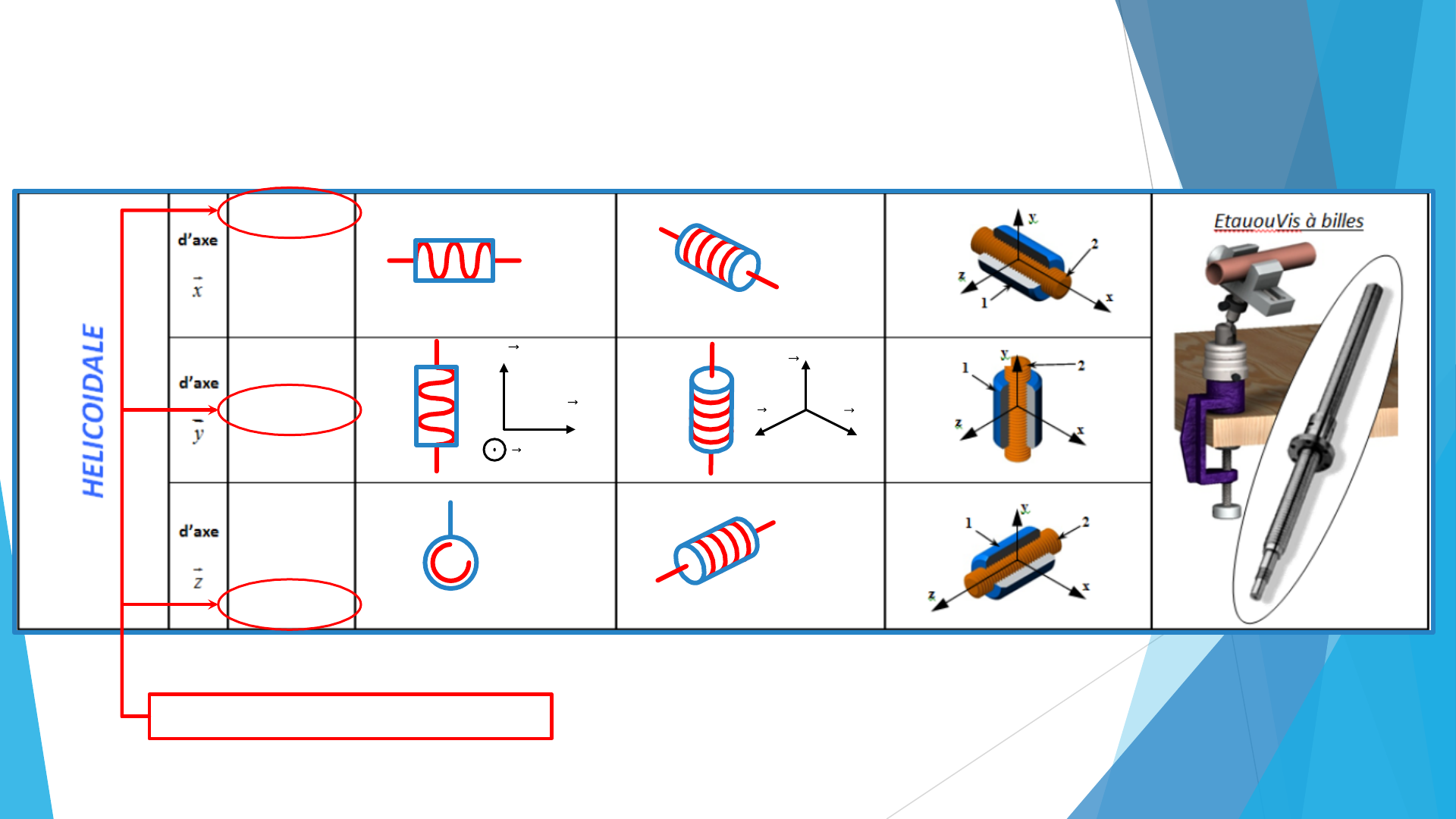
Mobilités conjuguées
T
X
= 0 R
X
= 1
T
Y
= 1 R
Y
= 1
T
Z
= 1 R
Z
= 1
T
X
= 1 R
X
= 1
T
Y
= 0 R
Y
= 1
T
Z
= 1 R
Z
= 1
T
X
= 1 R
X
= 1
T
Y
= 1 R
Y
= 1
T
Z
= 0 R
Z
= 1
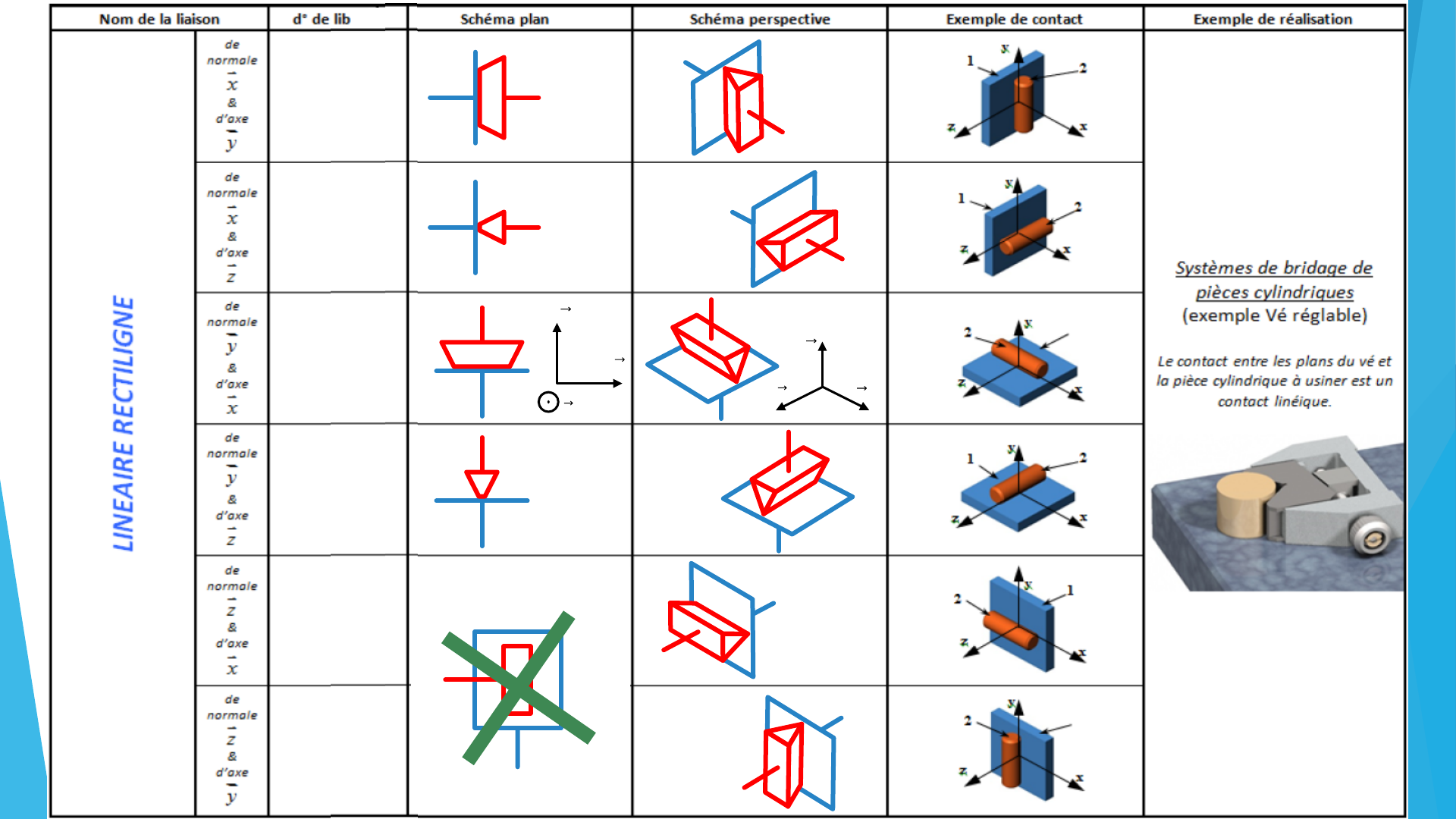
LES LIAISONS CINEMATIQUES
LES LIAISONS CINEMATIQUES
T
X
= 0 R
X
= 1
T
Y
= 1 R
Y
= 0
T
Z
= 1 R
Z
= 0
T
X
= 1 R
X
= 0
T
Y
= 0 R
Y
= 1
T
Z
= 1 R
Z
= 0
T
X
= 1 R
X
= 0
T
Y
= 1 R
Y
= 0
T
Z
= 0 R
Z
= 1
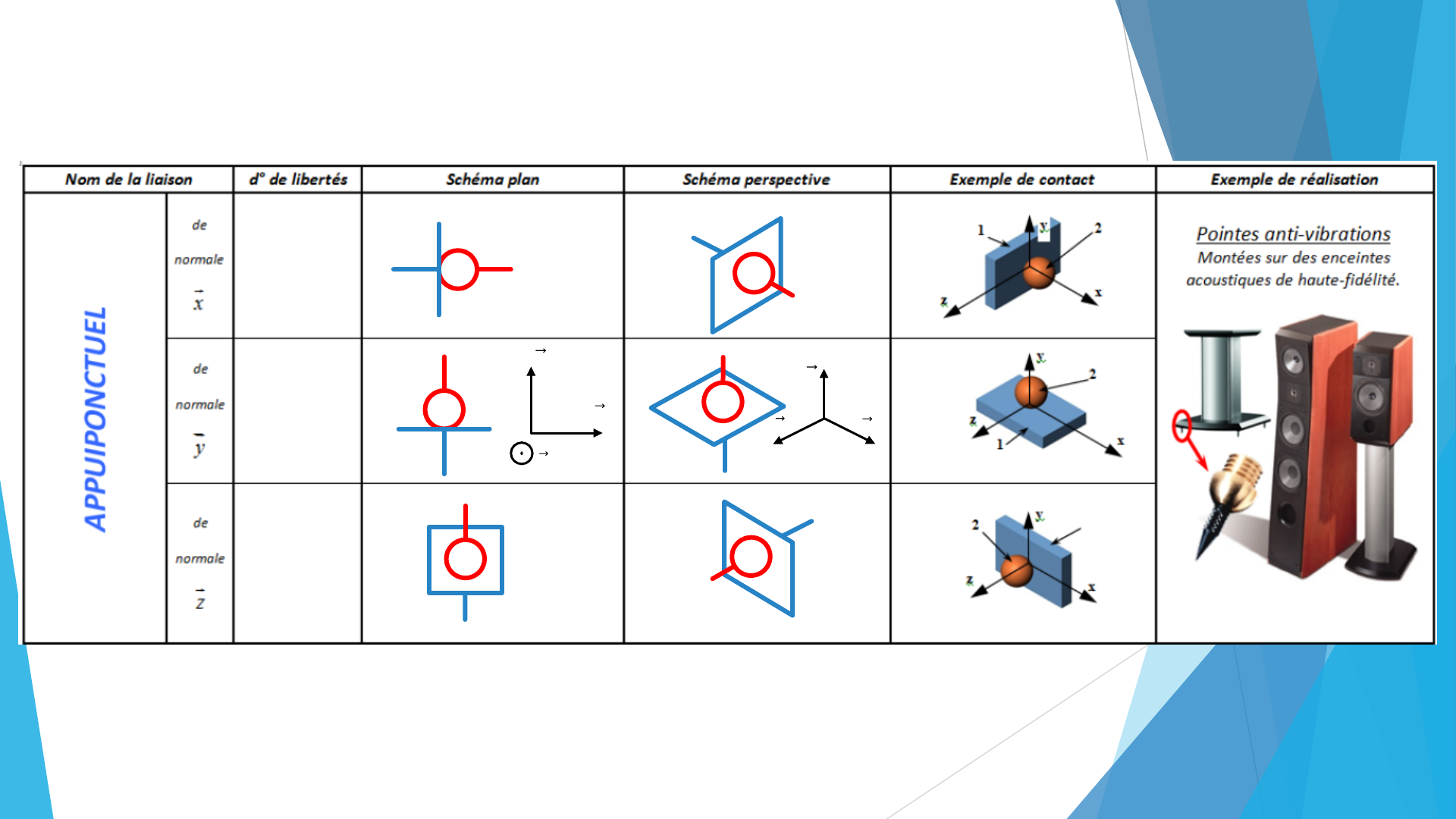
LES LIAISONS CINEMATIQUES
T
X
= 0 R
X
= 1
T
Y
= 0 R
Y
= 1
T
Z
= 0 R
Z
= 1
T
X
= 1 R
X
= 1
T
Y
= 0 R
Y
= 1
T
Z
= 0 R
Z
= 1
T
X
= 0 R
X
= 1
T
Y
= 1 R
Y
= 1
T
Z
= 0 R
Z
= 1
T
X
= 0 R
X
= 1
T
Y
= 0 R
Y
= 1
T
Z
= 0 R
Z
= 1
LES LIAISONS CINEMATIQUES
T
X
= 0 R
X
= 1
T
Y
= 1 R
Y
= 1
T
Z
= 1 R
Z
= 0
T
X
= 0 R
X
= 1
T
Y
= 1 R
Y
= 0
T
Z
= 1 R
Z
= 1
T
X
= 1 R
X
= 1
T
Y
= 0 R
Y
= 1
T
Z
= 1 R
Z
= 0
T
X
= 1 R
X
= 0
T
Y
= 0 R
Y
= 1
T
Z
= 1 R
Z
= 1
T
X
= 1 R
X
= 1
T
Y
= 1 R
Y
= 0
T
Z
= 0 R
Z
= 1
T
X
= 1 R
X
= 0
T
Y
= 1 R
Y
= 1
T
Z
= 0 R
Z
= 1
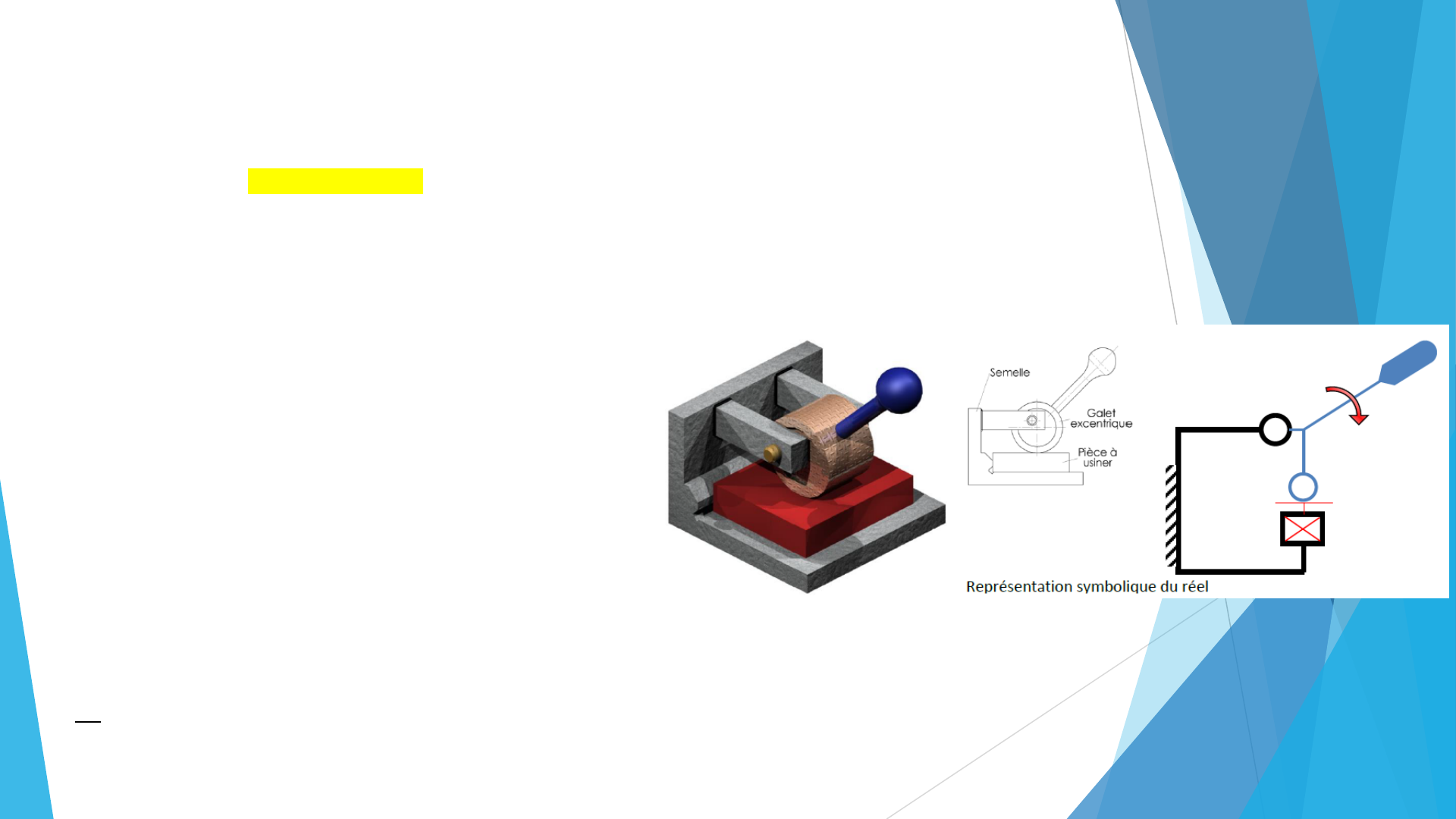
LA RÉALISATION DU SCHEMA CINÉMATIQUE
LA RÉALISATION DU SCHEMA CINÉMATIQUE
LA RÉALISATION DU SCHEMA CINÉMATIQUE
Appui plan de
normale
Ponctuelle de
normale
Ponctuelle
de normale
Pivot glissant
d’axe (E,
)
Pivot
d’axe
(G,
)
LA RÉALISATION DU SCHEMA CINÉMATIQUE
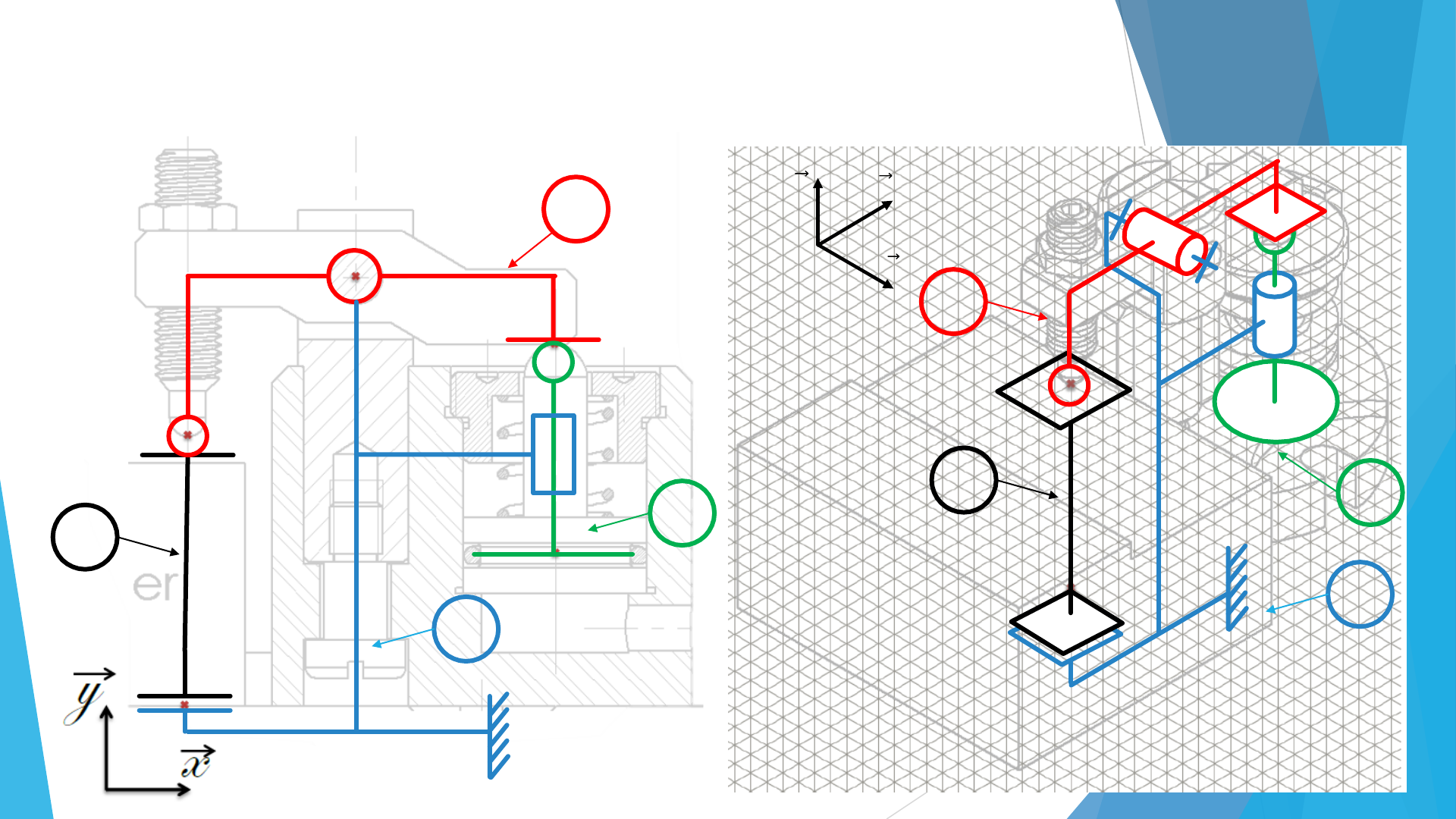
2.6 TRACE DU SCHEMA CINEMATIQUE
A
B
D
C
A
B
D
C
G
E

3. MODELISATION DES REALISATIONS
Selon l'objectif, une même réalisation peut être modélisée différemment afin de mettre
en évidence différents aspects de la liaison. La modélisation s''établie alors soit par :
• une analyse des contacts par une étude des surfaces fonctionnelles,
• une analyse des mouvements par une étude des degrés de libertés. de l'étude
La réalisation des liaisons utilise différentes technologies:
Ø réalisation par contact direct,
Ø réalisation par interposition d'éléments glissants (coussinets),
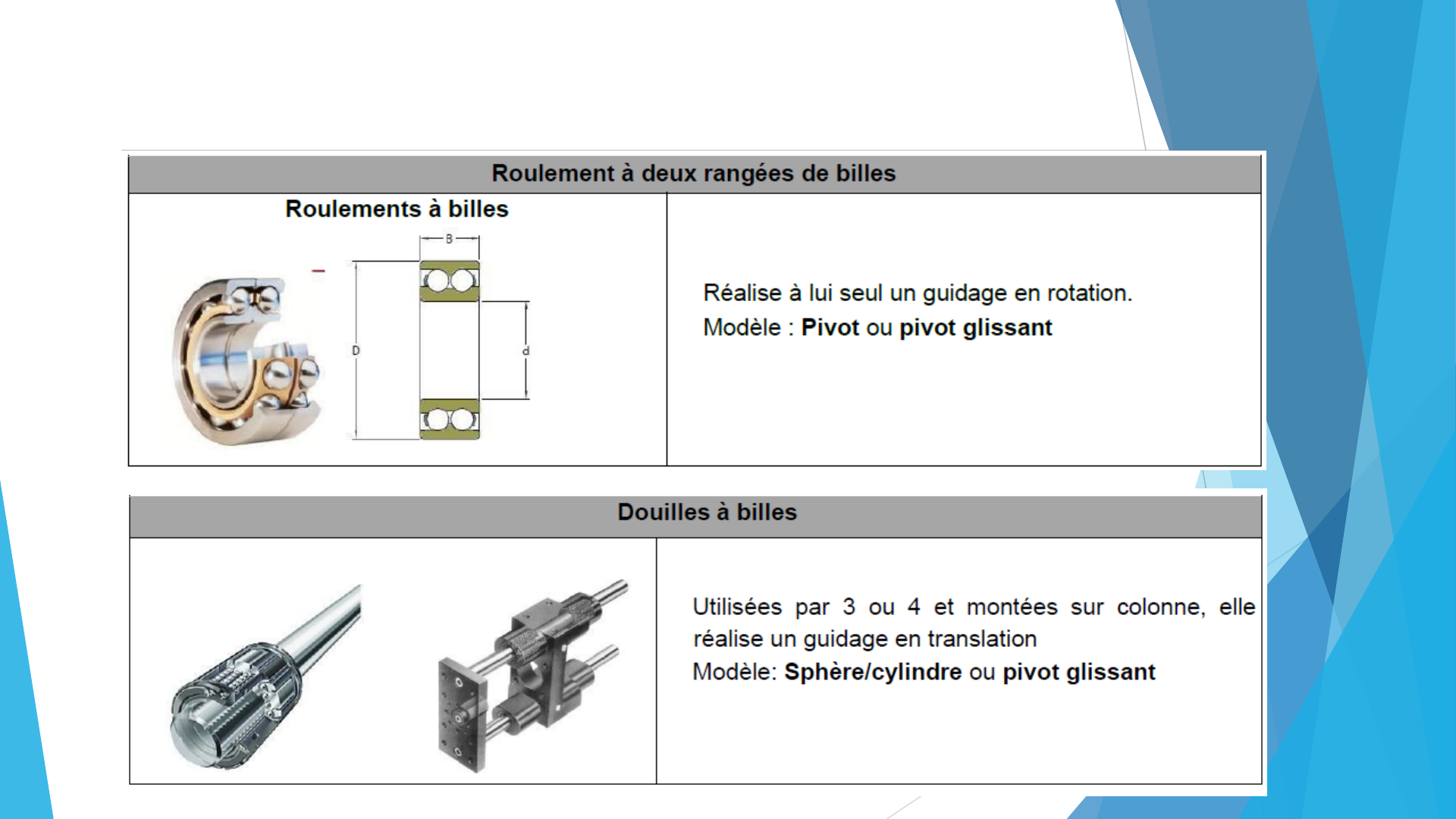
Ø réalisation par interposition d'éléments roulants (roulements),
Ø réalisation par interposition d'un film d'huile (paliers hydrauliques),
Ø réalisation sans contact (paliers magnétiques).
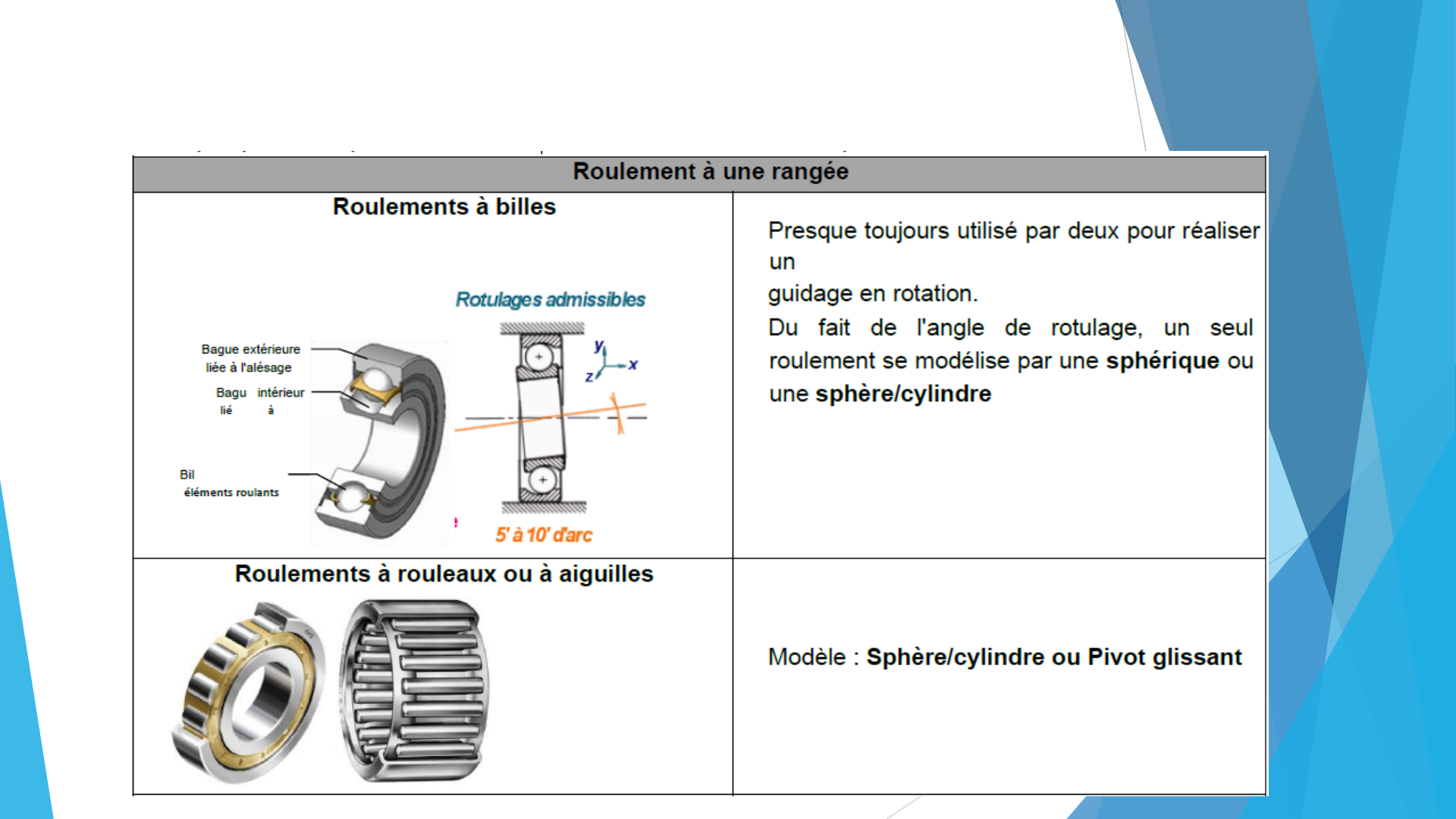
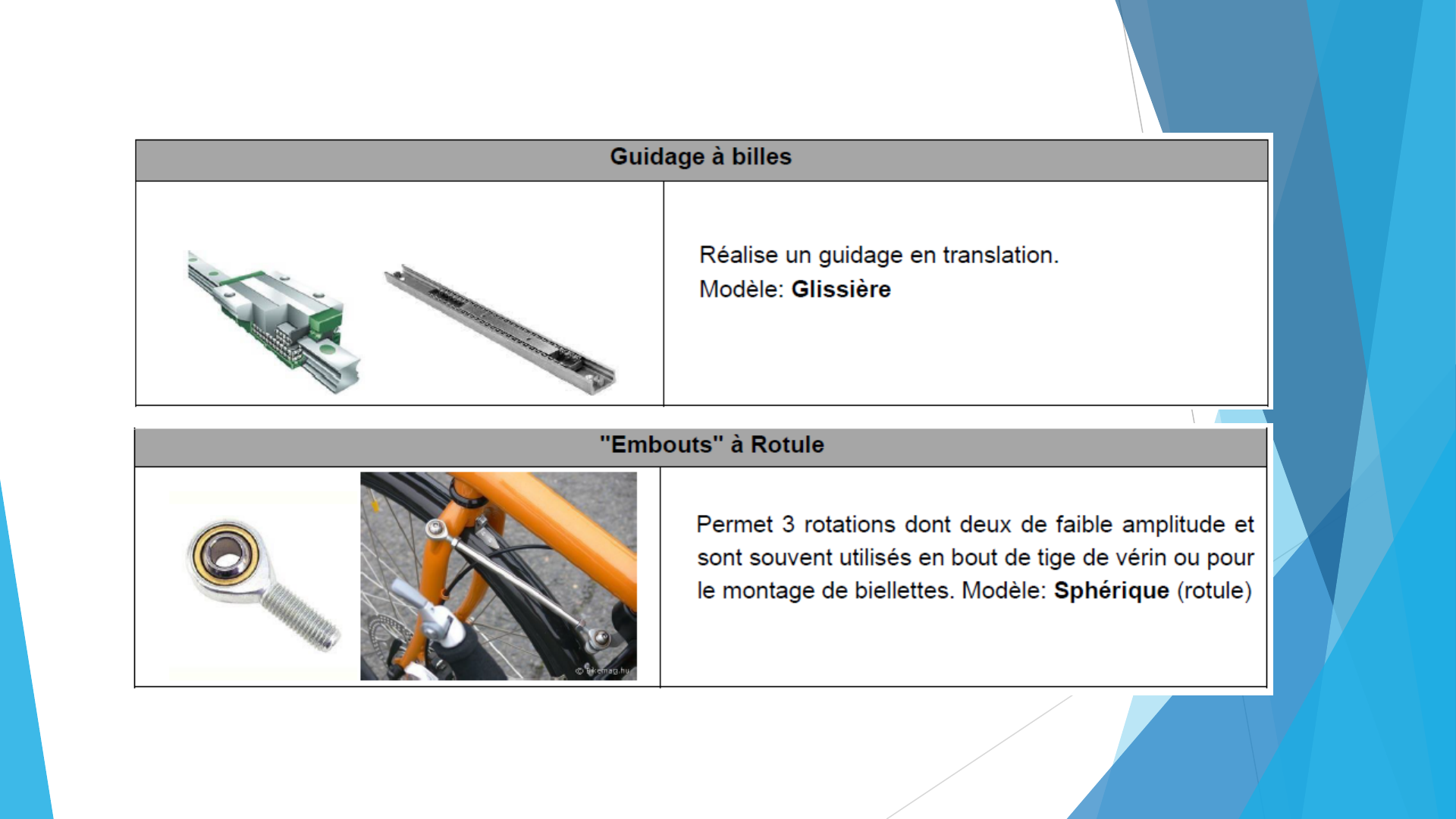
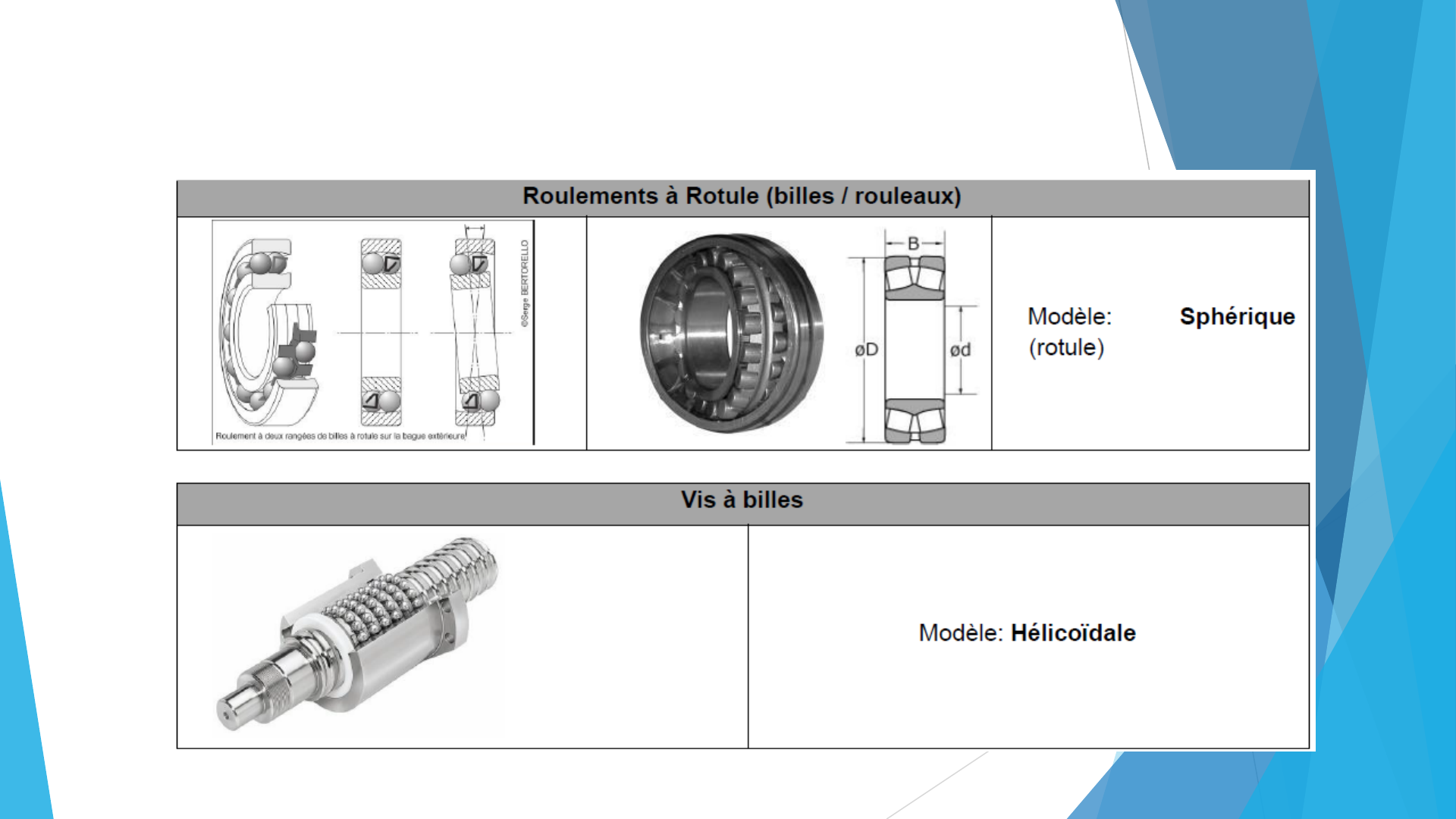
exemples de modélisation d'éléments standards
fréquemment rencontrés
exemples de modélisation d'éléments standards
fréquemment rencontrés
exemples de modélisation d'éléments standards
fréquemment rencontrés
exemples de modélisation d'éléments standards
fréquemment rencontrés
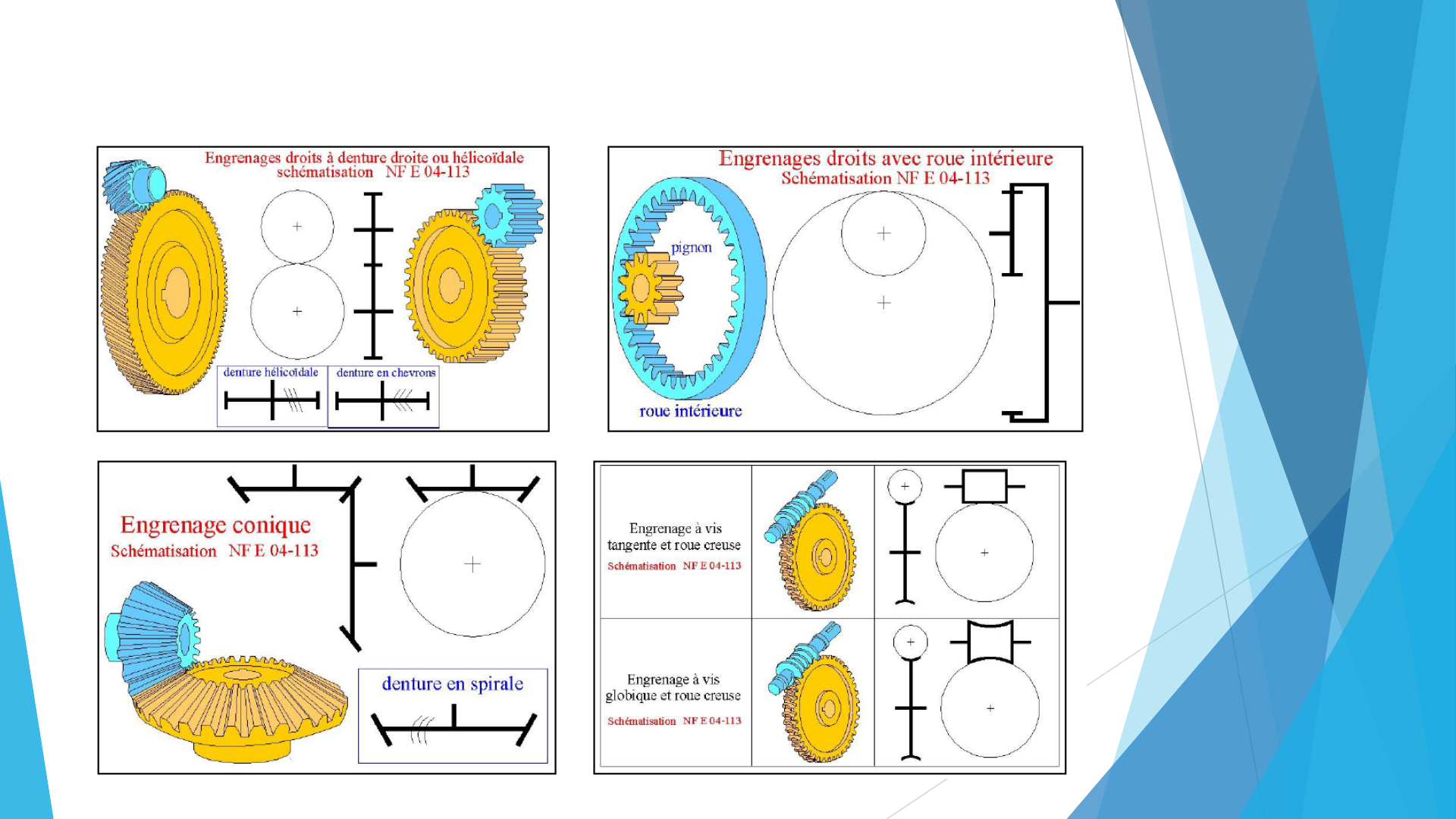
5. PRINCIPAUX SYMBOLES ASSOCIES AUX SYSTEMES
MECANIQUES
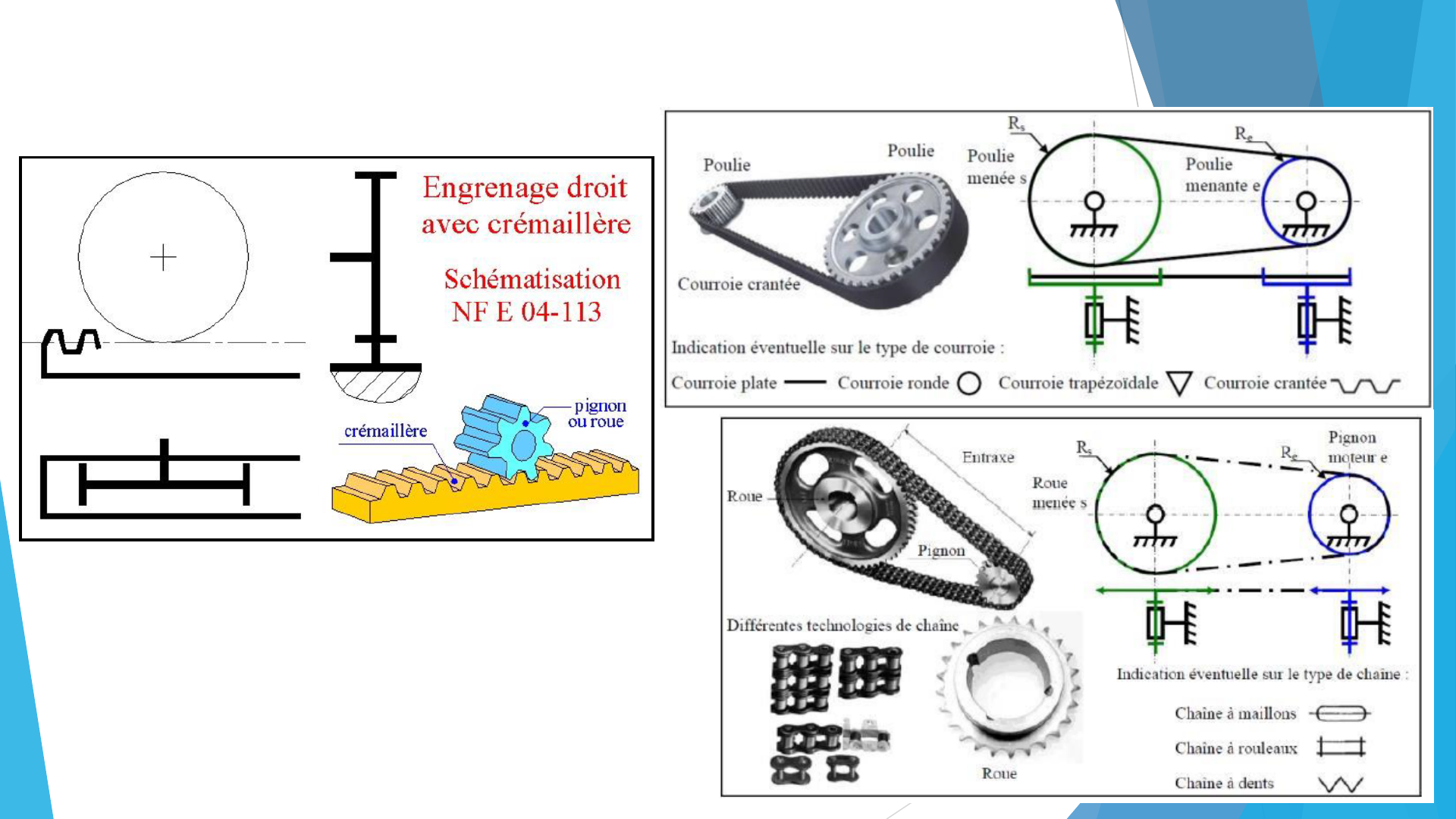
5. PRINCIPAUX SYMBOLES ASSOCIES AUX SYSTEMES
MECANIQUES