Les systèmes informatiques embarqués
De nombreux objets (voitures, vélos, robots, drones, etc.) intègrent un ordinateur. Ces systèmes, appelés « systèmes informatiques embarqués[1] », associent à des cartes programmables des capteurs et actionneurs ainsi qu'un ou plusieurs écrans.
Comment le comportement d'un objet est-il contrôlé ?
Le vélo électrique
Un vélo électrique est un vélo classique auquel On intègre des capteurs[2], qui acquièrent toutes les données nécessaires à l'assistance au pédalage, et un actionneur[3] (moteur) qui augmente Ou réduit la vitesse du vélo.


Exemple :

A quoi servent les capteurs et l'actionneur dans un vélo électrique ?
L'ajustement du niveau d'assistance au pédalage
Selon une directive européenne, pour qu'un vélo électrique soit considéré comme un vélo et non comme un cyclomoteur, il faut que l'assistance au pédalage cesse dès que la vitesse du vélo électrique atteint 25 km/h : le vélo peut alors rouler plus vite mais sans assistance.
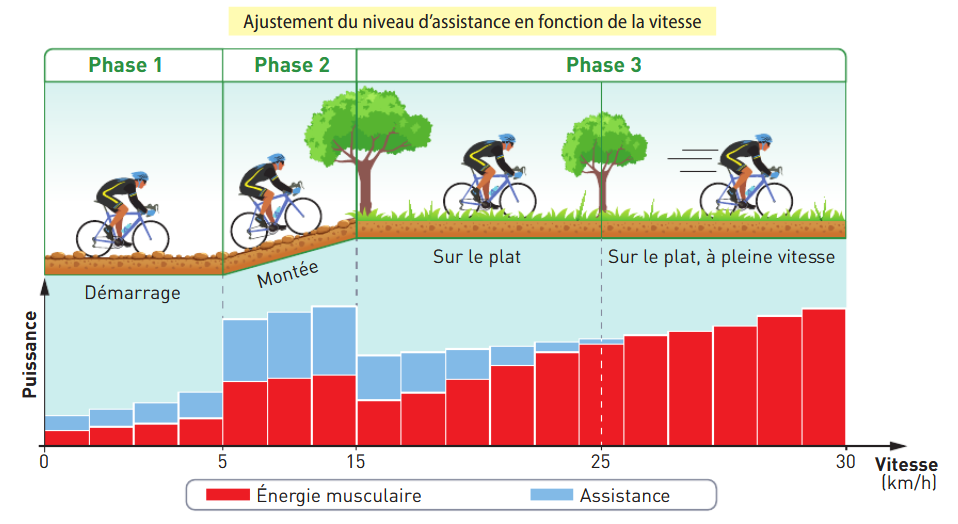
Exemple :
Décrire le comportement de l'assistance électrique pour chacune des trois phases.
Que se passe-t-il lorsque le cycliste est à 15 km/h et qu'il est dans une montée ?
Algorithme de contrôle de l'assistance électrique
L'assistance électrique d'un vélo doit être constamment modulée. On peut décrire ce comportement sous la forme d'un algorithme[4] de contrôle.
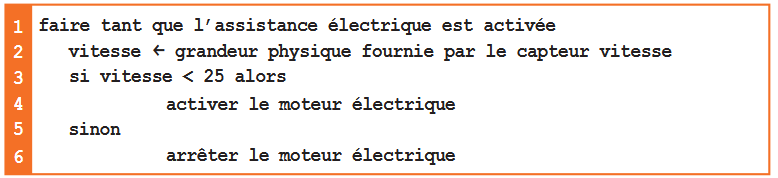
Exemple :
A quoi sert l’algorithme de contrôle ?
CONCLUSION.
Comment peut-on contrôler le comportement d'un objet ou d'un système ?